�ȸ�־����������Á�����3D�����c��ģ�ͣ��@�������v�v�@ô�����㷨����u���ɡ�
�u��
Ͷ���Լ�λ�þ��_��
�mȻ�҂�߀�]���ƶ��κξ��_�Ĺ��Ɓ��M�Ѓ������������O����̓�M��λ����֮�g�ĺ������҂���Ҳ����һ�N�^��֫E�ĽǶȁ��M���^�졣
�M�����҂��ķ�ʽ�܉���������_���������R�ķ���representation������Ҫ�f������y����ɫ�ʵ�3D�����r���҂�߀����һЩС���}�ġ�
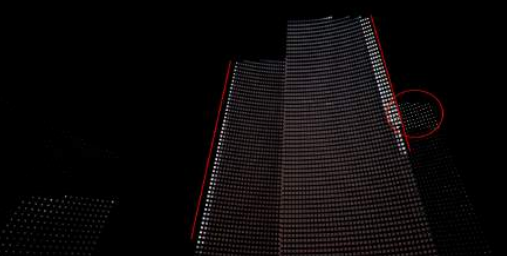
���磬��D���҂��܉�l�F��ȵ؈D��RGBȫ���DƬ֮�g�IJ��f�{��������߅��������߅�ĵ��{ɫ��սo�_�y�ˡ�
���⣬ƽ����Ͷ����cͬ�rҲ�����˴�����յ��c�������߰����f��ԓ�Ƕ��x��o�F�h����˲���ԓ���F�ġ�
�P���@�c����ǰ�Ќ���(Branislav Micusik)���Ŀʹ���ˮ���ֵ����������ʹ�õĈ����Ǹ����s�ęC���W���㷨��
��һ�����}���^�h���c����ÿ��ȫ���DƬ�d��r�����h���c׃�ø���ϡ�ٲ��Ҿ��_����ʧ�����M�϶����c�ƕr����Щ���Dz���ƥ�䣬�����ؽ���ģ�����������c��
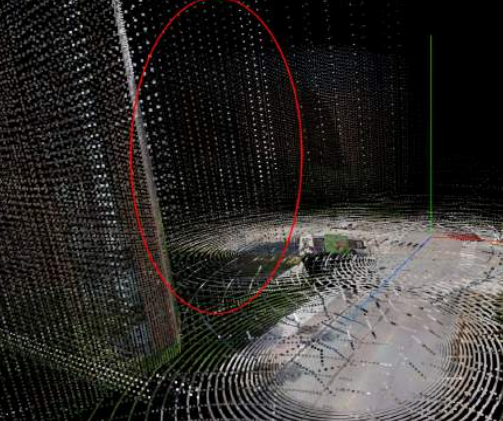
��D��ʾ��һ�����ε�����ķ�ʽ�������ںϳɶ���ȫ���DƬ�r�����������ľ��x�������
�����ȫ���ķ���;S�ȿ������ѽ�ƥ��ĕr���ȷ�����Ȼ�Ў����`������ںϳɶ���ȫ���DƬ�r�����F��ֱ����ġ���Ӱ��Ч�����@�����Ԛw���ڵ��Ă����E�з���ʽ�IJ����_��
̽�����g
������������u�����҂��J����Ҫ����һ���ض����Ñ������������IJ�ͬ�Ƕ�̽���@���ؽ������硣��ˣ��҂�������3��camera��
��1���oֹ�ĸ�Ĕz��C�����㷨ϵ�d��ȫ���DƬ�r���܉�һ��һ�����^���ؽ��^�̡��@�����C���h���������d����c�ƶ�׃������ͬ�r���D���ֲ�׃��
��1���ؙE�A��܉�����D�����C���܉�o�Ñ�һ���V韵�ҕ�ǁ��^�콨���������c�ơ������\�ӕ�����ÿһ�����x�飺

�㷨5��Ӌ��C܉��Ӌ��
��1���������C�������Ñ����ɵ��ڿ��g���Ƅӡ��z��C�����I�P�����Լ�����Ƅӵ�[x,y]ƽ���M���Ƅӡ�
���⣬һ�������IJˆΣ��Ñ����Ը�׃FOV����ȫ���DƬ����Ͷ����һ�������ϡ�
���һ������������Ҫ������������Ñ�ƥ��ȫ���DƬ���c�ơ�
 δ��VR���翴�����@ô����
δ��VR���翴�����@ô���� �����\��AR���g����������
�����\��AR���g���������� Tvori�w����ʽ�Ͼ� VR�Ӯ���������
Tvori�w����ʽ�Ͼ� VR�Ӯ��������� VR����ô���_�҂��Ĵ��X��
VR����ô���_�҂��Ĵ��X��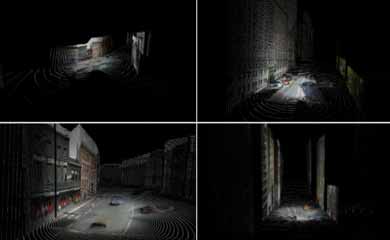 �ȸ�־���������3D�����c��ģ���㷨�u��
�ȸ�־���������3D�����c��ģ���㷨�u��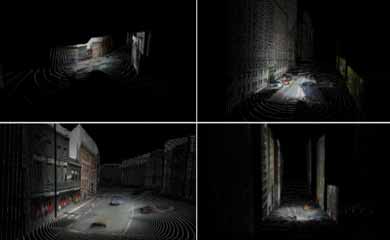 �ȸ�3D�����c��ģ�ͺϳ��c�Ʒ���
�ȸ�3D�����c��ģ�ͺϳ��c�Ʒ���

 �湫�W���� 43011102000836̖
�湫�W���� 43011102000836̖